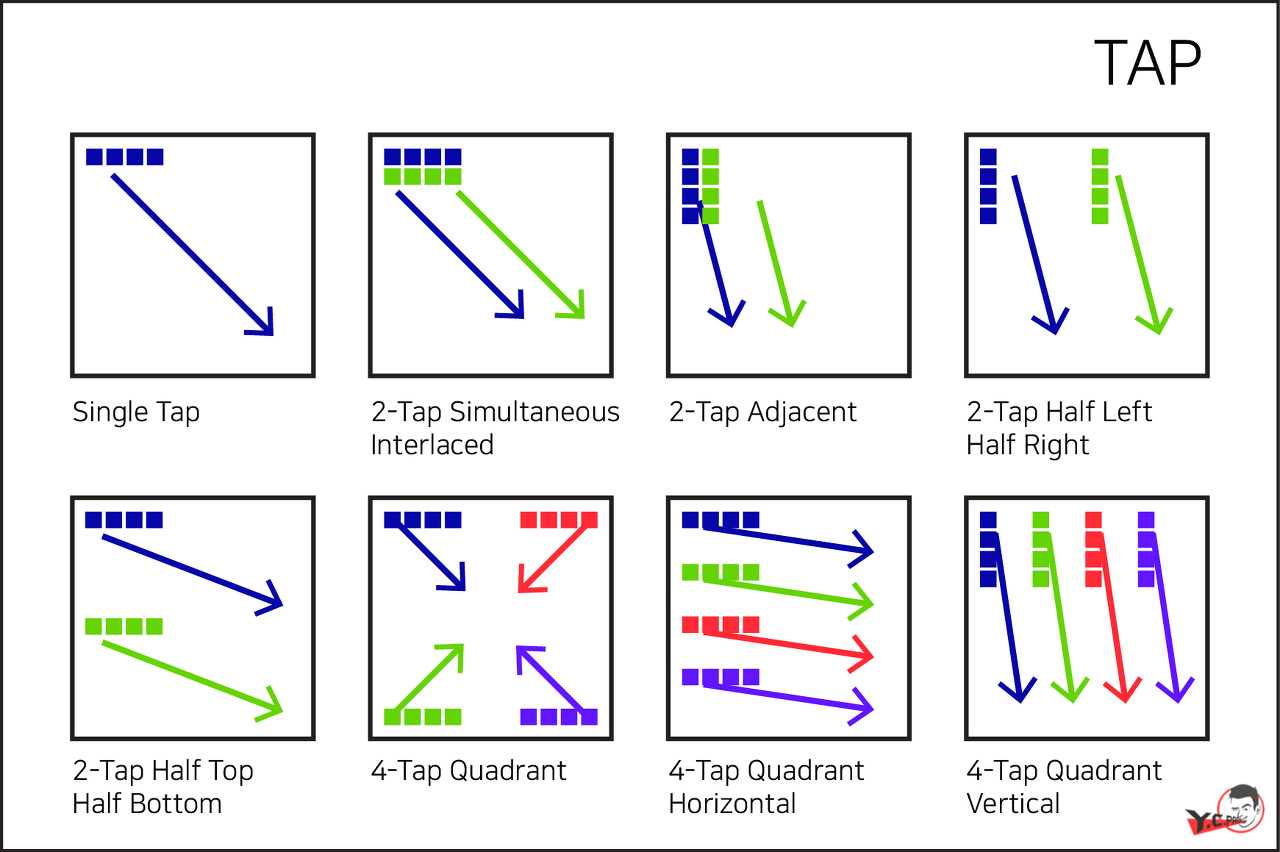
1. 카메라 센서 출력의 TAP(탭)
머신비전 카메라 인터페이스 중 카메라 링크(Camera Link)를 사용하시는 분들은 꼭 설정 하는 부분인데 그 의미보다는 그냥 카메라가 나오니까 설정하시는 분들이 많이 계십니다.
실제로 그렇게 사용상 중요한 내용은 아니기 때문에 그러실 것이라 생각이 드네요
Camera, 혹은 FrameGrabber 설정 파일에서 TAP 설정을 많이 보셨을 텐데요 2 TAP 3 TAP... 10 TAP 8bit, 10bit 뭐 이런 형식입니다.
TAP의 숫자는 이미지를 가져올 때 가져오는 수(데이터량)이며 방향은 보시는 이미지와 같이 여러가지가 있습니다.
Base급 카메라는 대역폭이 적기 때문에 2 TAB, 3 TAB 정도지원하구요. 카메라 링크 케이블을 2개 사용하는 Camera Link Full급에서 그 이상의 탭을 지원합니다.
데이터 량이 늘어남에 영상에 노이즈가 낄 확률이 높아지기 때문에 케이블 길이를 평소보다 짧게 쓰시거나 리피터를 사용하시는 것을 권장 드립니다.
Euresys FrameGrabber 에는 Eco, Eco+ 기능이 있어서 20%정도 더 길게 사용할 수 있다고 하는데요. ? 물론 환경에 따라 드리겠지만 효과는 확실히 있습니다.
2. Binning(비닝)
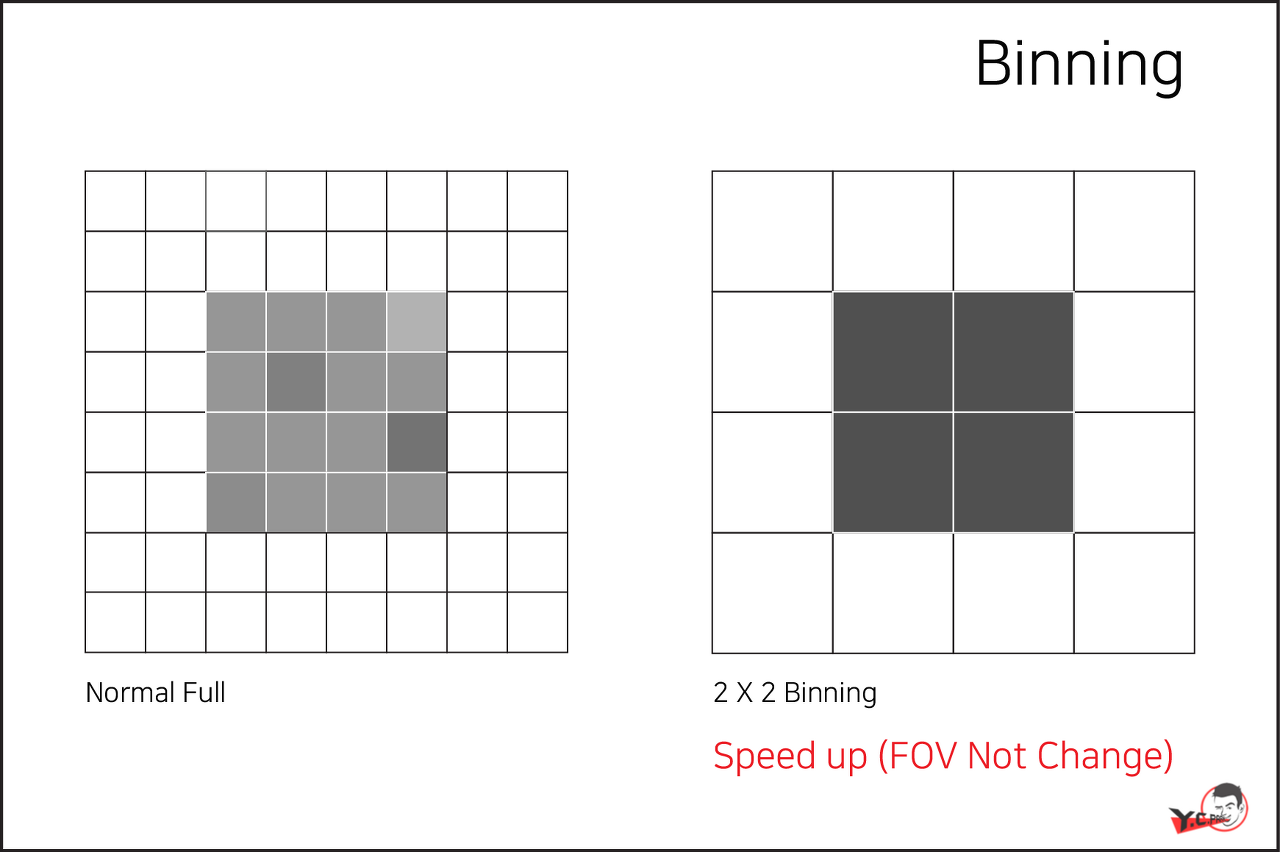
Binning은 쉽게 설명드리면 그림에서 보시는 것과 같이 주변 셀을 합쳐서 하나의 셀로 표현하는 것입니다.
fov 가 변하지 않는 장점은 있지만 해상도가 떨어지는 단점이 있죠.
왜 이 기능을 쓸까요? 대부분 빛이 부족하거나 색감을 표현하기 힘들 때 분해능을 포기하고 선명도를 높일 때 사용합니다.
이미지의 깊이가 좋아진다고 할까요? 그런 느낌.??
3. Partial(파샬)

Partial(파샬)은 내가 보고자 하는 영역만 데이터를 가져오는 것입니다.
필요없는 데이터를 센서에서부터 가져오지 않기 때문에 카메라 프레임도 빨라집니다.
실제로 3D 카메라나 3D 센서에 이미 적용이 되어 있습니다. 실제로 이렇게 사용하시는 분도 많이 계시구요.
Partial(파샬)에서의 중요한 것은 이미지 영역을 줄이는 것이니만큼 잘 들어오는지 확인하셔야 합니다. ^^
4. Sub-Sampling
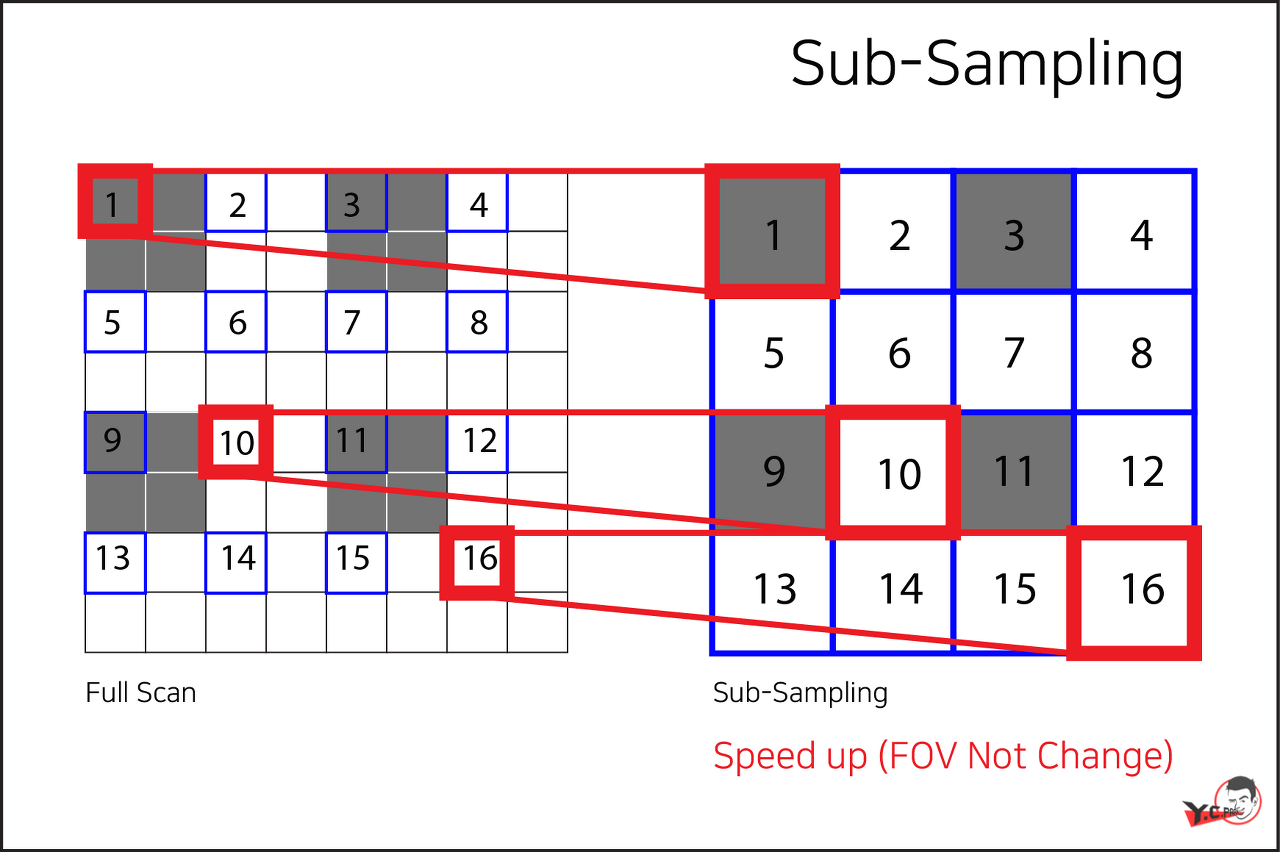
Sub-Sampling(서브샘플링)은 일정한 간격의 셀을 불러와 이미지를 재구성하는 방법인데 장점으로는 FOV가 줄어들지 않습니다. 그렇다고 깊이감이 늘어나지 않죠 ㅎㅎ
사실 왜 있는지 잘 모르는 기능입니다. ㅎㅎㅎ 실제로 쓰시는 분을 못봤습니다.
그냥 이런기능이 있다 정도만...?
FOV는 유지되지만 실제 데이터 유실이 생기는데요? 이럴 바에야 5메가 쓸꺼 2메가 쓰면 해결 될텐데 가격도 더 저렴할 테구요,
폴라라이즈드 카메라가 이런 형식으로 0도, 45도, 90도 180도 편광이미지를 가져옵니다.
5. ROI, Multi ROI (AOI)
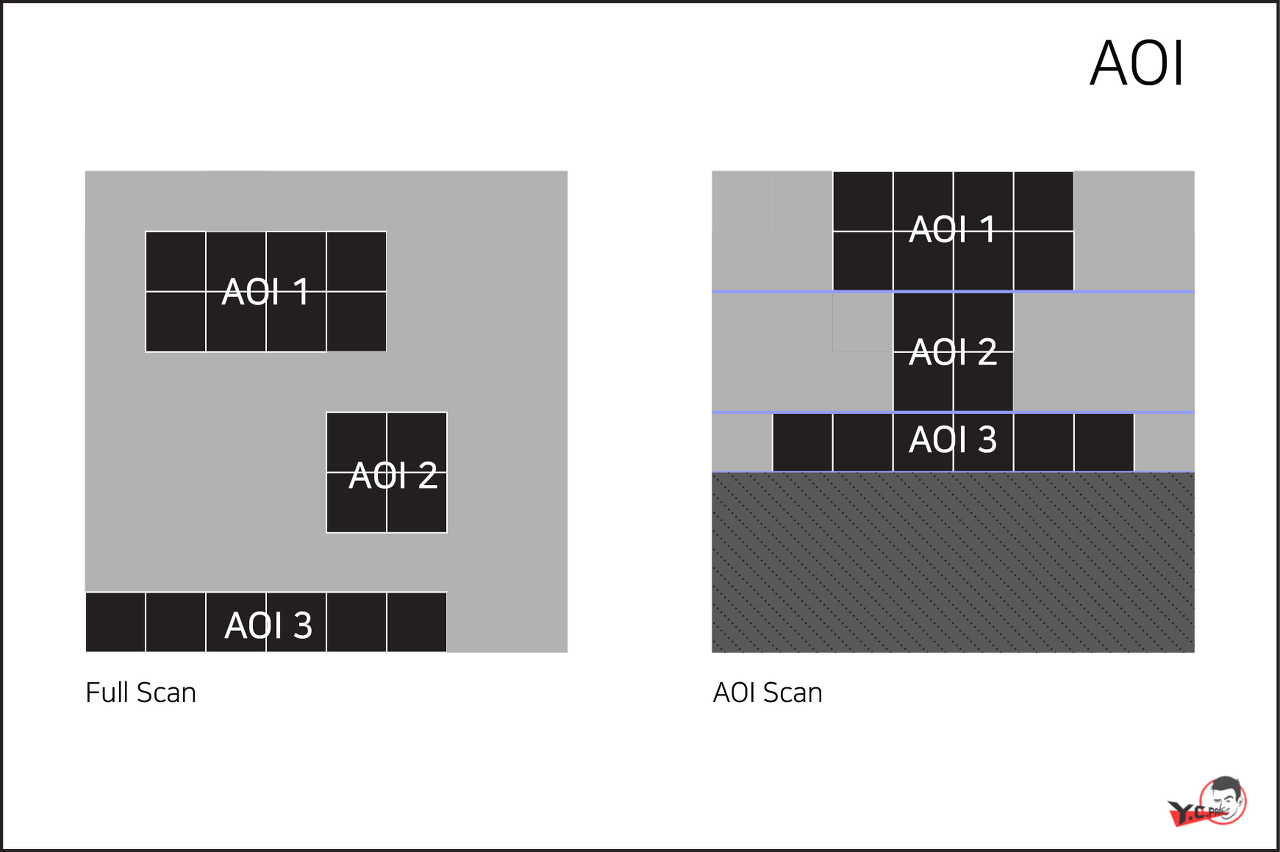
ROI는 센서의 일부분만 데이터로 받아 전송하는 기술인데요 여러 영역을 지정하면 멀티 ROI(Multi ROI)라고 합니다.
AOI라고도 부르기도 합니다. 실제로 많이 쓰이는기능입니다.
이미지와 같이 필요한 부분의 데이터만 가져오는 것인데 파샬과 비슷해서 전송데이터가 적기 때문에
프레임도 빨라집니다.
처음부터 검사에 방해가 되는 부분을 잘라내기 때문에 이미지 데이터량이 적은데요?
계속 같은 자리에 검사체가 들어오고 여러가지 검사체를 검사해야 한다면 정말 효율적인 기능이라고
말씀드릴 수 있습니다.
머신비전 쓰시는 분들이 많지 않아서 도움이 되셨으면 좋겠습니다.
많은 도움이 되셨기를 바랍니다. 끝.
알 것 같지만 잘 모르는 머신비전 카메라의 기본기능
와이씨 파크 블로그를 찾아주셔서 감사합니다. 머신비전 카메라에 들어있는 기능을 간략하게 소개해 드리고자 합니다. 이 기능들은 많은 분들이 들어봤지만 사용해본 경험은 많지 않으실 거라
my-rom.tistory.com
'[카메라·영상]' 카테고리의 다른 글
| 6분할 칼라휠(color wheel) (0) | 2023.07.26 |
|---|---|
| PoCL (Power over Camera Link) 이란 (0) | 2023.07.05 |
| SWIR(Short Wavelength InfraRed) sensor (0) | 2023.03.22 |
| 텔레센트릭 렌즈(Telecentric Lens)란 무엇인가? (0) | 2023.01.26 |
| 카메라 렌즈 화각이란? (0) | 2023.01.17 |